The study carried out by Fırat Rozkan Kılıç and Mehmet Özgen Özdoğan, Assoc. Prof. Dr. Berk Canberk and Assist. Prof. Dr. Gökhan Seçinti was awarded the best paper.
The study titled "CLAN: A Robust Control Link for Aerial Mesh Networks in Contested Environments", carried out by Fırat Rozkan Kılıç and Mehmet Özgen Özdoğan from ITU-Aselsan Academy Master Program, together with their academic advisors Assoc. Prof. Dr. Berk Canberk and Assist. Prof. Dr. Gökhan Seçinti was awarded the best paper at EAI 7th International Conference on Industrial Networks and Intelligent Systems 2021 (EAI INISCOM 2021).
We congratulate our students and professors and wish them continued success.

CLAN: A Robust Control Link for Aerial Mesh Networks in Contested Environments
[ABSTRACT]
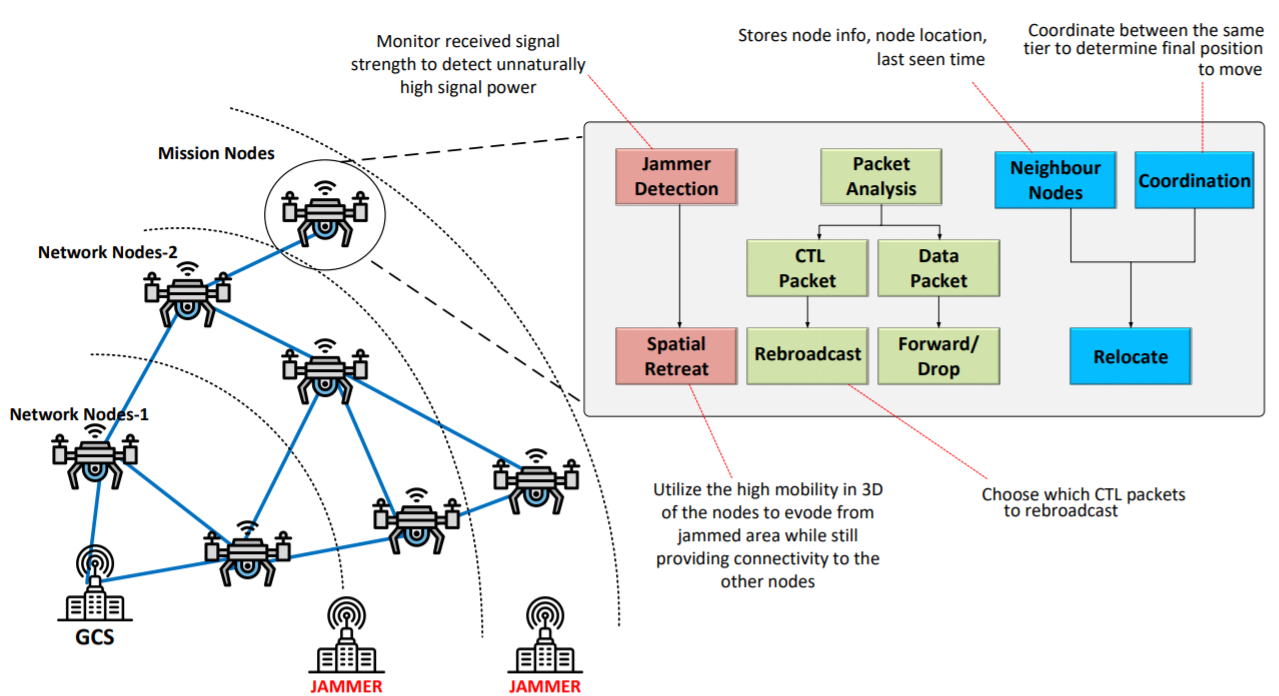
Huge increase in the availability of commercial off-the-shelf unmanned aerial vehicles drastically shifts the way these devices operate and interact, enabling easy and affordable deployment of multiple drones to form a mesh network to perform aerial multi-robot missions such as 3D mapping, surveillance. This trend led to the development of unique applications and services relying on aerial mesh networks in contested environment, but also enables adversaries to improve their ability to counteract using simple techniques such as jamming. In this paper, we propose a robust Control Link for Aerial mesh Networks, namely CLAN, jointly disseminating mesh and UAV control traffic, to ensure reliable control communication for aerial mesh networks, via multi-path, multihop control links in contested environment. CLAN forms a dynamic tree topology, where control traffic is forwarded through multiple hops and utilizes multiple access technologies enabling multi-path end-to-end links in order to mitigate the effects of decreased signal power in longer ranges and the possibility of jamming attacks. Computer simulations of the contested environment show that the proposed CLAN algorithm that uses modified B.A.T.M.A.N. algorithm to selectively rebroadcast traffic control messages in order to significantly reduce the traffic control message number by 90% while improving the connectivity of the nodes compared to single hop MAVLink communication up to 72% in simulation results.